热点资讯
其他资讯
辰时镇新机电步进式BH120R-L1-3-B2-D1-S8恒温行星减速机
文章来源:ymcdkj
发布时间:2024-05-03 05:11:23
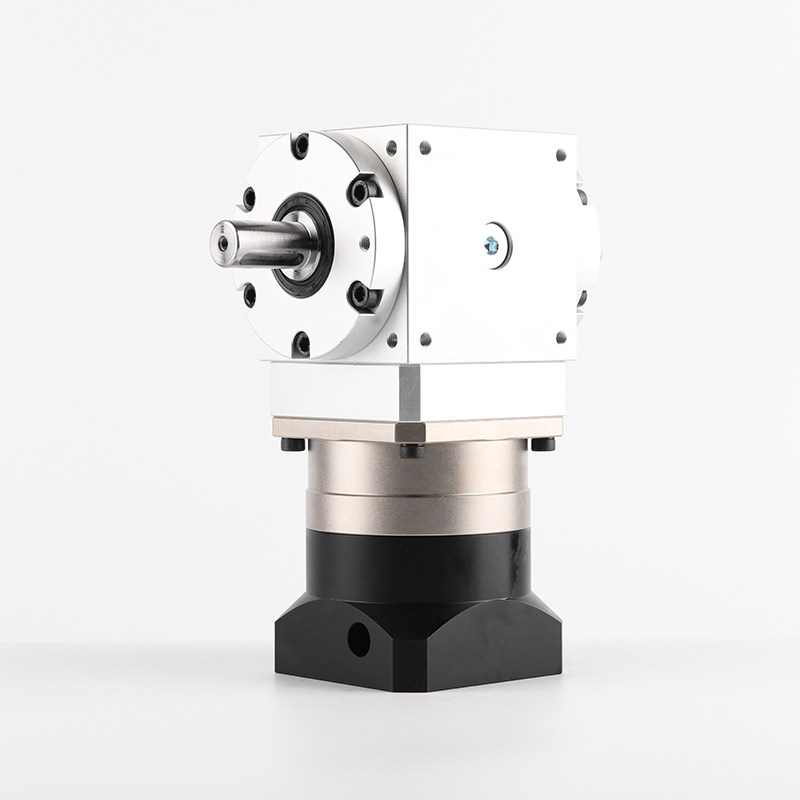
-D1-S8恒温行星减速机
轴承中振动的产生一般来说,滚动轴承本身不产生噪音。通常感觉到的轴承噪音事实上是轴承直接或间接地与周围结构产生振动的声音效应。这就是为什么许多时候噪音问题可被视为涉及到整个轴承应用的振动问题。因加载滚动体数量变化而产生的激振:当一个径向负荷加载于某个轴承时,其承载负荷的滚动体数量在运行中会稍有变化,这引起了负荷方向的偏移。由此产生的振动是不可避免的,但可通过轴向预加载来减轻,加载于所有滚动体(不适用于圆柱滚子轴承)。
机械减速机装置能分别起以下作用:
1、改变动力机的输出速度(减速、增速或变速),以适合工作机构的工作需要;
2、改变动力机输出的转矩,以满足工作机构的要求;
3、把动力机输出的运动形式转变为工作机构所需的运动形式〔如将旋转运动改变为直线运动,或反之)。
4、将一个动力机的机械能传送到数个工作机构,或将数个动力机的机械能传递到一个工作机构。
5、其他的特殊作用,如有利于机器的装配、、维护和安全等而采用机械减速机装置。减速机是一种相对精密的机械,使用它的目的是降低转速,增加转矩。它的种类繁多,型号各异,不同种类有不同的用途分类。
行星减速机的选型计算公式
例:被驱动设备所需功率为3KW,转速=360r/min,工作12小时/天。均匀负载启动次数少,求电机型号!
答:(一) 电机选型
1、 设选择电动机的转速为1450r/min,计算减速比
028≈4
2、减速机的级数为 (3-10)
3、减速机效率η为96%
4、均匀负载且在启动次数少的情况下可选f1=1.25
5、电机功率为p1n
p1n≥p1 × f1=p2 5KW
6、根据转速、功率确定电动机型号
(二) 减速机选型
1、计算被驱动设备的扭矩 T2
=79.58Nm
2、计算减速机输出扭矩T2N
T 75Nm
3、根据减速比、减速机输出扭矩、输入电机端尺寸、输出设备端尺寸选择合理的减速机。
多电机驱动系统作为运动控制研究领域的重要内容之一,广泛应用于地铁,机车牵引,挤压机组,机器人等应用场合。而要推出性能优良的机车牵引,机器人等工业驱动以及综合电力舰船系统就需要解决同一直流母线电源和同一逆变器供电的多台电机独立运行问题[1]。 在过去的二十多年,越来越多的研究人员关注研究多相电机,因为多相电机相对于传统的三相电机存在诸多的显着优点,包括:减少转矩脉动,降低直流母线电流谐波含量,潜在的率,降低各相功率,由于较高的容错能力大大提高可靠性[2]。 常见的一种多相电机是双三相电机[3],而双三相永磁同步电机是目前研究较为广泛的一种多相电机,与传统的三相电机相比,双三相电机将基波电流产生的次谐波磁势提高到了11次,消除了对电机性能影响的5次、7次谐波磁势,大大减少了电机的转矩脉动,提升了电机性能[4]。所以我以双三相永磁同步电机为例来研究多相电机的多电机串联控制。 多相电机驱动控制策略中, 影响力和代表性的是基于空间矢量解耦的矢量控制。矢量控制方式的实质是将交流电动机等效为直流电动机,分别对速度,磁场两个分量进行独立控制。通过控制转子磁链,然后定子电流而获得转矩和磁场两个分量,经坐标变换,实现正交或解耦控制。简单的说,空间矢量控制就是通过坐标变换将交流电机模型等效为直流电机,实现磁链与转矩解耦,有利于分别设计两者的调节器,以实现对交流电机的高性能调速。所以对双三相永磁同步电机空间矢量控制技术的研究具有一定的研究意义。
+
SP 140S- r> SP 140S-M
SP 140S br> SP 075X- S
SP 075
SP 100X-MF1-3 -4 -5 -7 -10-1E1-2S
1E1-2S
SP 140-MF1-3 SP 100S-MF1-3 -4 -5 -7 -10-1E1-2S
SP 060S-MF1-3 -4 -5 -7 -10-0B1-2S SP 100W-MF1-3 -4 -5 -7 -10-1E1-2S
SP 100W- r> SP 075S-M
SP 075S
下一篇:浙江9crwmn御钢出品